

В настоящее время создание крошечных роботов, по размерам и конструкции напоминающих насекомых, пока кажется достаточно дорогостоящим развлечением. Но потенциал таких кибернетических “насекомых” огромен, их можно будет использовать в миссиях по спасению и оказанию помощи пострадавшим, в сельском хозяйстве, экологическом мониторинге и во многих других областях. Однако, создание таких роботов и их основных компонентов – источников питания, управляющей электроники, датчиков, двигателей и т.п., вызывает ряд трудностей, связанных с микроскопическим масштабом этих компонентов. И даже если эти трудности удается решить тем или иным способом, возникают другие, связанные со стабильностью движения или полета столь крошечных устройств.
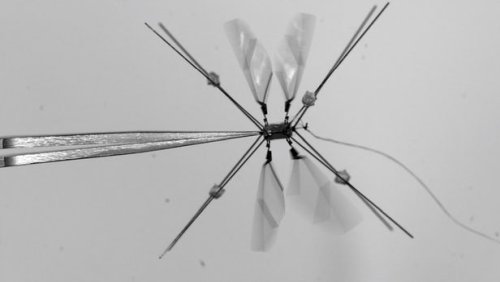
В свое время мы рассказывали о летающем микророботе RoboBee, разработанном специалистами из Гарвардского университета. Несмотря на долгую и упорную работу специалистов-робототехников, этот робот так и не обрел требуемой стабильности во время полета. Свое решение этой проблемы предложили недавно исследователи из университета Южной Калифорнии (USC), и это решение нашло воплощение в конструкции нового микроробота Bee+, который имеет не два, как его предшественник, а четыре маховых крыла.
Отметим, что маневренность робота RoboBee сильно ограничена одной парой его крыльев, которые приводятся в действие крошечными пьезоэлектрическими двигателями, весом по 25 мг. Как ни старались специалисты из Гарварда, но им удалось обеспечить лишь управление креном, тангажом и подъемной силой, а еще одна важная составляющая часть управления полетом, вращение, осталась за пределами возможностей двукрылой конструкции.
В своих исследованиях специалисты из USC заметили, что контроль вращения во время полета достаточно легко реализуется путем добавления к конструкции робота RoboBee еще одной пары маховых крыльев, как у некоторых насекомых. Однако, вес двигателей при такой схеме стал составлять 50 мг и оригинальный робот RoboBee, снабженный дополнительной парой крыльев, стал слишком тяжел и просто не смог подняться в воздух.
Исследователям из USC пришлось сделать новые более эффективные двигатели, конструкция которых представляет собой трехслойный “бутерброд”. Два внешних пьезоэлектрических слоя сокращаются поочередно в соответствии с подаваемыми на них сигналами. Работа этих слоев заставляет изгибаться средний слой, изготовленный из упругого материал, что приводит в движение крыло робота-насекомого. Помимо этого, такие двигатели более просты, чем двигатели оригинального RoboBee, и их изготовление обходится дешевле.
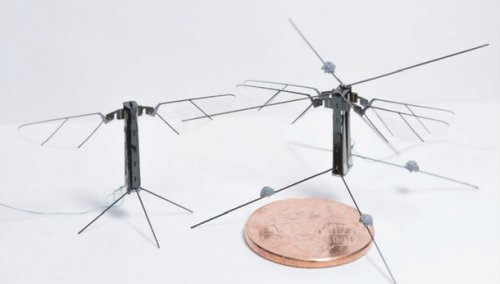
За счет использования новых двигателей вес робота Bee+ увеличился незначительно и составил 95 мг по сравнению с 80 мг веса оригинального робота RoboBee. Большая мощность этих двигателей уже позволяет роботу Bee+ подниматься в воздух, а наличие второй пары крыльев делает возможным маневрирование, за счет чего робот может летать по сложным траекториям, огибая препятствия. Помимо этого, наличие четырех крыльев позволяет снизить нагрузку на каждое крыло в отдельности за счет чего роботы Bee+ будут гораздо надежней и долговечней своих двукрылых предшественников.
Однако, даже робот Bee+ при всех его достоинствах очень далек от идеального робота-насекомого. Его вес в десять раз больше веса шмеля и если его снабдить собственным источником энергии и системой управления, то он вряд ли сумеет оторваться от поверхности, не говоря о том, чтобы поднять в воздух какой-нибудь полезный груз. Так что появления роев из таких летающих роботов-насекомых, которые будут выполнять различную полезную работу, нам придется ждать еще достаточно долго.