
Группа исследователей или Лаборатории искусственного интеллекта компании Google (Google AI lab) разработали систему, позволяющую роботу-собаке обучиться максимально точному копированию движений и поведения настоящей собаки путем «просмотра» специально подготовленных видеозаписей. Отметим, что обучение роботов выполнению определенных задач, подражая движениям живых существ, давно уже не является чем-то новым. К примеру, промышленные роботы-манипуляторы, собирающие автомобили на конвейере, выполняют сварочные работы и закручивают болты, копируя движения рук человека.
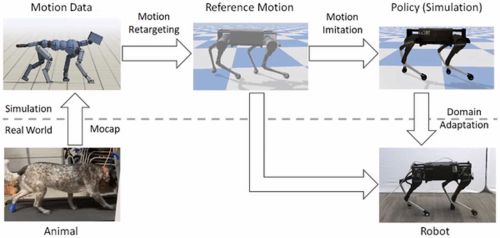
Однако, промышленные роботы, упомянутые чуть выше, действуют или по заранее созданной программе или обучаются при помощи специальных приспособлений. Они не могут быть обучены, путем анализа видео, на котором запечатлены действия человека, и именно такая функция является новшеством, разработанным специалистами Google AI lab. В данном случае четвероногий робот Laikago обучается ходить, двигать своим телом и даже использовать свой хвост при помощи видеозаписей движений настоящей собаки.
На практике обучающее видео сначала обрабатывается системой искусственного интеллекта, которая распознает движения, адаптирует и проверяет их при помощи виртуального робота Laikago. Для устранения возможных ошибок интерпретации и адаптации с учетом ограниченных возможностей механических суставов и приводов робота-собаки, система искусственного интеллекта должна произвести анализ нескольких видео, желательно снятых с разных ракурсов. В результате этого система создает базу данных движений, связывая их с определенными сценариями поведения. И как только эта база проходит проверку на виртуальном роботе, она загружается в «мозг» реального робота.
Приведенный ниже видеоролик демонстрирует в подробностях работу этой технологии. Конечно, очень легко заметить некоторые недостатки работы такой системы обучения, особенно по сравнению с более совершенными роботами, получающими свои навыки при помощи программирования, к примеру, роботами известной компании Boston Dynamics. И особенно заметна эта разница в «неприятных сценариях», когда роботу необходимо восстановить походку после «спотыкания» о препятствие или подняться после падения.
Но исследователи из Google AI lab питают изрядную долю оптимизма по этому поводу. Они рассчитывают, что увеличение функциональности их системы, которое они запланировали на ближайшее время, позволит роботу не только получить «более живое» поведение, но и обрести способности к самостоятельному поиску выходов из нештатных ситуаций.