

За последние годы нам доводилось видеть множество интересных и необычных робототехнических проектов, к которым можно смело отнести и робота Velox, созданного специалистами американской компании Pliant Energy Systems. Двигательная установка этого робота, основанная на двух “плавниках”, совершающих колебательные движения, позволяет ему эффективно скользить в толще и на поверхности воды, перемещаться по сложной поверхности, а недавно робот обрел новые способности, которые позволяют ему использовать свои плавники в роли коньков для передвижения по поверхности открытого гладкого льда.
Уникальные способности робота Velox, как это ни странно, являются результатами исследований в области возобновляемых источников энергии. Именно в этом направлении работает компания Pliant Energy Systems, специалисты которой стремятся создать высокоэффективные преобразователи энергии морских волн в электрическую энергию. И, как оказалось, что принципы, обеспечивающие сбор энергии волн, могут использоваться для обеспечения движения рукотворных аппаратов в морской среде.

Вместо твердых вращающихся лопастей, которые заставляют двигаться морские суда и субмарины, робот Velox использует пару гибких плавников. Бортовой центральный процессор управляет работой нескольких приводов, которые, распределяя энергию должным образом, создают волнообразные колебательные движения плавников. В свое время мы уже видели роботов с подобной двигательной системой и знаем, что такая система не только отличается высокой эффективностью, она дает плавающим роботам достаточно высокую маневренность.
Отличием конструкции робота Velox от конструкций других подобных роботов является то, что когда ему требуется выйти и начать перемещаться по суше, робот разворачивает свои плавники на 90 градусов вниз. Прочности материала, из которого изготовлены плавники, достаточно для того, чтобы они, не прогибаясь, удерживали вес самого робота и несомого им полезного груза, сохраняя, при этом, возможность совершения колебательных движений в другой плоскости.
Как уже упоминалось выше, робот Velox способен передвигаться по снегу, песку, грязи, по каменистой и ровной твердой поверхности. Во всех случаях оптимальный режим движения плавников выбирается микроконтроллером, получившим недавно обновленное программное обеспечение, которое при помощи некоторых новых принципов позволяет роботу Velox достаточно быстро скользить на плавниках по льду, словно конькобежцу.
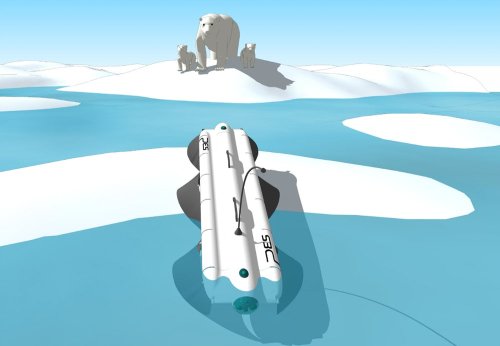
Согласно информации, предоставленной компанией Pliant Energy Systems, робот Velox является сейчас лишь первым экспериментальным образцом. Тем не менее, его возможности к перемещениям в различных средах обеспечивают ему очень широкую область применения. Такие роботы могут использоваться для доставки боеприпасов и медикаментов на поле боя, а импровизированные “коньки” могут пригодиться роботам, принимающим участие в исследованиях полярных регионов нашей планеты.