

Группа исследователей из Калифорнийского университета в Лос-Анджелесе, возглавляемая профессором биоинженерии Али Хадемоссейни (Ali Khademhosseini), создала крошечного мягкого робота, который приводится в движение живыми клетками тканей сердечной мышцы и который подражает биомеханике движений морского ската. Данная технология может дать начало новому направлению биовдохновленной робототехники, регенерационной медицины и медицинской диагностики.
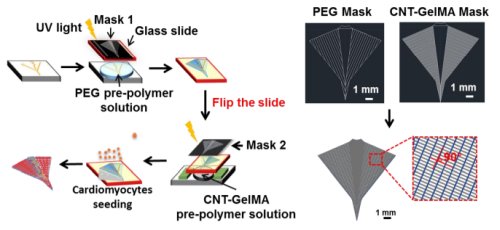
Достаточно простое строение тела морского ската, его плавные формы и достаточно большая маневренность, обеспечиваемая плавниками-крыльями, делают их идеальной моделью для построения различных биоэлектромеханических и робототехнических систем. Крошечный робот-скат, длина которого составляет всего 10 миллиметров, состоит из четырех слоев. Основным слоем является слой живых клеток тканей сердечной мышцы, которые зажаты в «каркас» из двух слоев специализированного биосовместимого материала. И четвертым, последним слоем, является гибкий слой тонкого металлического электрода.
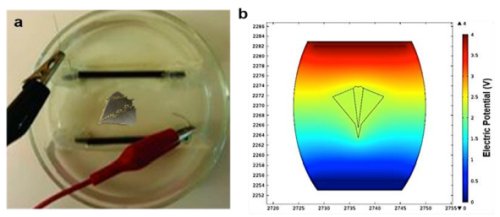
Когда на электроды подается небольшой электрический потенциал, это приводит к сокращению клеток тканей сердечной мышцы, благодаря чему робот может «махать» своими плавниками-крыльями так же, как это делает его живой прототип.
«Развитее подобных биовдохновленных систем позволит в будущем создавать робототехнические устройства, содержащие как ткани биологического происхождения, так и обычную электронику» — рассказывает профессор Хадемоссейни, — «А такие крошечные биороботы могут, в свою очередь, стать основой новых способов борьбы с различными заболеваниями. В частности, они смогут провести «ремонт» сердечных тканей, пострадавших в результате сердечного приступа, и многое другое».